探索捡高尔夫球机器人的原理
高尔夫球机器人是一种自动化设备,设计用于在高尔夫球场上帮助收集散落的高尔夫球。其原理基于先进的机器视觉、导航和操控技术。让我们深入了解其工作原理:
1. 机器视觉系统
高尔夫球机器人配备了先进的机器视觉系统,通常包括摄像头、激光传感器或雷达。这些传感器能够扫描周围环境,识别地面上的高尔夫球。通过图像处理算法,机器可以准确地确定球的位置和方向。
2. 地图与定位
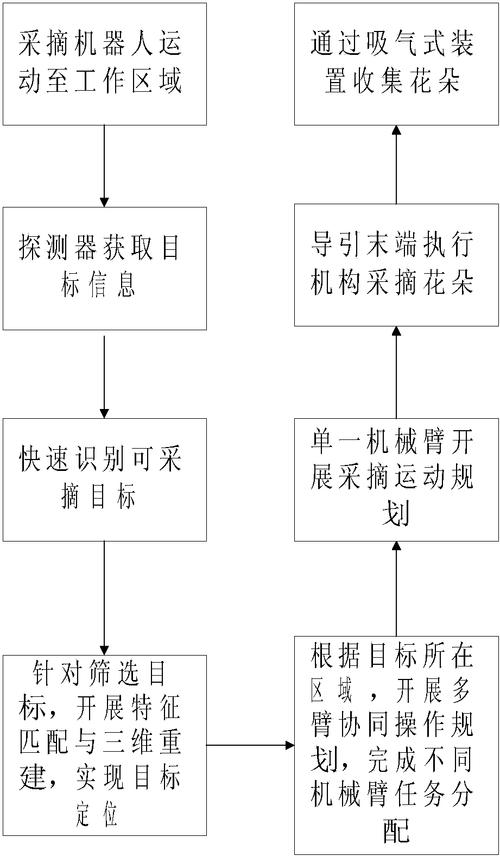
机器视觉系统获取的信息用于创建地图,并确定机器人当前位置。这通常使用SLAM(Simultaneous Localization and Mapping)技术实现,该技术允许机器人在未知环境中同时构建地图并定位自身。
3. 导航与路径规划
一旦机器人知道了自己的位置和周围环境,它就可以使用路径规划算法来计算最有效的路线,以收集高尔夫球而不与其他障碍物发生碰撞。这些算法通常考虑到球的位置、场地的形状、地形等因素。
4. 操控和收集
机器人根据路径规划系统提供的指令进行移动,并使用操控装置(例如机械臂或吸盘)来收集高尔夫球。这些装置通常设计精巧,以确保机器人能够有效地捡起球并将它们存放在容器中。
5. 自动化和智能化
高尔夫球机器人的关键之处在于其自动化和智能化程度。它能够在没有人类干预的情况下完成任务,并能够适应不同的高尔夫球场环境。其智能算法使其能够实时调整策略,以应对突发情况或变化的场地条件。
6. 通信和远程监控
一些高级的高尔夫球机器人可能配备了通信模块,使其能够与其他设备或中央控制系统进行通信。这样的设计使得操作人员可以远程监控和管理机器人的运行,甚至进行远程操控。
结论
高尔夫球机器人的原理基于先进的机器视觉、导航和操控技术,以及智能算法的应用。通过这些技术的整合,机器人能够高效地在高尔夫球场上收集散落的高尔夫球,减轻了球场维护人员的负担,提高了球场管理的效率和质量。
免责声明:本网站部分内容由用户自行上传,若侵犯了您的权益,请联系我们处理,谢谢!联系QQ:2760375052









滨鑫
这家伙太懒。。。
- 暂无未发布任何投稿。